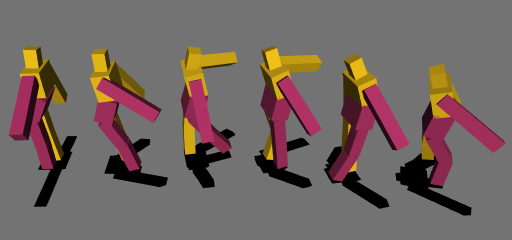
WebGLとCUDAで動く深層学習用のライブラリを作って深層強化学習 (Deep Deterministic Policy Gradient, DDPG) で二足歩行を学習させました。学習環境の作成にはOimoPhysicsを使いました。
開発の経緯や以下実装方法、学習結果などです。例によって怪しい個所へのツッコミは歓迎です。
WebGLとCUDAで動く深層学習用のライブラリを作って深層強化学習 (Deep Deterministic Policy Gradient, DDPG) で二足歩行を学習させました。学習環境の作成にはOimoPhysicsを使いました。
開発の経緯や以下実装方法、学習結果などです。例によって怪しい個所へのツッコミは歓迎です。